





by nicolofanzonetp
Artwork: NICOLA FANZONE
Copyright © 2022
MAT

Copyright © 2022
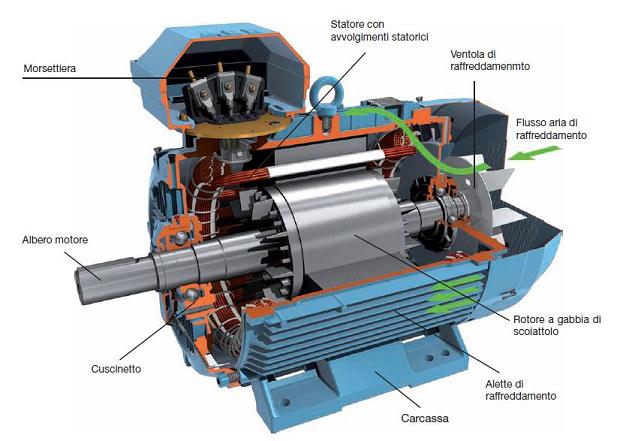
Le parti principali di cui si compone un motore asincrono trifase sono: – statore; – rotore; – avvolgimenti statorici; – avvolgimenti rotorici; – morsettiera; – parti meccaniche.
Il motore asincrono è un motore elettrico in corrente alternata in cui la velocità angolare del rotore è inferiore alla velocità di rotazione del campo magnetico generato dagli avvolgimenti dello statore, da cui l’asincronismo (al contrario del motore sincrono, in cui la velocità del rotore è diretta funzione della frequenza di generazione del campo statorico). Il motore asincrono è detto anche motore a induzione in virtù del suo principio di funzionamento descritto di seguito.
Quando, a causa di una forza esterna, il rotore ha una velocità superiore al campo rotante dello statore, il motore asincrono può essere utilizzato come generatore asincrono con o senza l’utilizzo di condensatori a seconda che venga collegato alla rete o no. È utilizzato per piccole potenze, in occorrenze nelle quali si preferisce la facilità d’impiego rispetto al motore sincrono che richiede l’uso di inverter (o di un sistema di eccitazione del campo rotorico) anche a discapito del rendimento. Tuttavia il rendimento è in funzione della potenza massima e diminuisce all’aumentare del numero di poli, generalmente per i motori trifase va da 0,67 fino a 0,97 per i motori più grandi[1].
Il motore si compone di una parte fissa detta statore e una parte mobile detta rotore. Lo statore è formato da un pacco di lamierini aventi la forma di corona circolare. Le scanalature interne al pacco di lamierini statorici accolgono i conduttori (filo di rame smaltato) dell’avvolgimento statorico, che può essere trifase oppure bifase (a seconda del tipo di corrente alternata di alimentazione). Il rotore è situato all’interno dello statore ed è costituito da un pacco di lamierini aventi la forma di corona circolare. Esso presenta un foro interno per il passaggio dell’albero di rotazione, e scanalature esterne (cave rotoriche) per accogliere l’avvolgimento rotorico. Quest’ultimo può essere di due tipi: rotore avvolto (detto anche ad anelli); rotore a gabbia di scoiattolo (detto anche in cortocircuito). Tra statore e rotore è lasciato un piccolo spazio detto traferro, per consentire la libera rotazione del rotore. Questo sottile spessore d’aria (che funge da dielettrico) è di qualche decimo di millimetro o comunque quanto più piccolo consentito dalle tolleranze meccaniche. Gli avvolgimenti statorici sono in genere inglobati in resine, che garantiscono anche un’ottima protezione dall’acqua e dagli agenti atmosferici. Lo statore contiene in genere un numero pari di avvolgimenti in quanto, normalmente, ce ne sono due per ciascuna fase di alimentazione. Un motore a tre fasi, o trifase, avrà quindi come minimo sei avvolgimenti, cioè una coppia di poli per ogni fase, mentre un motore a due fasi avrà tipicamente quattro avvolgimenti. I due avvolgimenti di ciascuna coppia polare sono collegati in serie e disposti fisicamente l’uno di fronte all’altro. Nel caso del motore trifase a sei avvolgimenti le coppie polari presentano uno sfasamento di 120° fisici ed elettrici; invece, nel motore bifase le due coppie polari hanno uno sfasamento di 90° fisici ed elettrici.
L’avvolgimento statorico è alimentato con una corrente alternata; grazie alla disposizione delle coppie polari, sfasate tra loro, la corrente genera un campo magnetico complessivo che ruota nello spazio con la stessa frequenza della corrente di alimentazione (campo magnetico rotante), chiamato campo di statore. L’avvolgimento del rotore (dotato di un certo numero di fasi, di norma chiuse in corto circuito), è immerso in questo campo magnetico rotante. Dato che il rotore gira più lentamente del campo di statore (vedi scorrimento), il flusso magnetico sotteso dall’avvolgimento di rotore varia; di conseguenza, il campo magnetico rotante induce delle correnti nel rotore per induzione magnetica (legge di Faraday). Queste correnti indotte, a loro volta, generano un campo magnetico rotorico, che si oppone alle variazioni di flusso; esso interagisce con il campo statorico, generando una coppia sull’avvolgimento rotorico che fa ruotare il rotore. Infatti, in accordo alla legge di Lenz, il campo magnetico indotto nel rotore ha sempre verso opposto rispetto a quello statorico. Scorrimento: si noti la diversa velocità di rotazione tra il campo magnetico statorico (linee di campo nere) e il rotore. La rotazione del campo magnetico di statore avviene ad una velocità fissa ns detta velocità di sincronismo e legata alla frequenza di alimentazione f (50 Hz, ovvero 50 giri al secondo, nel caso di corrente di rete in Europa e con motore con numero minimo di coppie polari). Curva di coppia di 4 differenti motori elettrici asincroni: A) Motore monofase B) Motore polifasico a singola gabbia di scoiattolo C) Motore polifasico a singola gabbia di scoiattolo a barre profonde D) Motore polifasico a doppia gabbia di scoiattolo Le correnti indotte nel rotore produrranno a loro volta un campo magnetico che ruota a velocità ns − nr rispetto al rotore, il quale ruota a velocità nr rispetto allo statore; il risultato è che il campo di rotore ruota alla velocità ns rispetto allo statore ed è dunque sincrono con il campo di statore. Tale condizione di sincronismo tra le due onde di campo magnetico assicura che il motore produca una coppia costante. La situazione in cui ns=nr, cioè velocità di rotore uguale a quella di sincronismo, è una condizione limite in cui non vi sono forze elettromotrici (e quindi correnti indotte) e dunque la coppia motrice è zero. Diversamente, la mutua interazione attraverso i relativi campi magnetici tra le correnti di rotore e quelle di statore produce una coppia risultante netta. Quindi, la velocità di rotazione del rotore nr sarà sempre leggermente minore di quella di sincronismo; la differenza è proporzionale alla coppia resistente del motore in rotazione. Il legame tra velocità di sincronismo ns, frequenza f di alimentazione e il numero p di poli (oppure pc di coppie polari per fase) è espresso dalla relazione: {\displaystyle n_{s}=\,{\frac {120f}{p}}=\,{\frac {60f}{p_{c}}}}{\displaystyle n_{s}=\,{\frac {120f}{p}}=\,{\frac {60f}{p_{c}}}} Dove ns è espressa in rpm (rotazioni per minuto) ed f è espressa in Hertz. Per esempio, nel caso più semplice, un motore a tre fasi con una coppia di poli per fase, alimentato a 50 Hz ha una velocità angolare di sincronismo di 3000 giri al minuto. Nel caso invece di 2 coppie per fase (pc=2) il motore avrà una velocità angolare di 1500 giri al minuto. La velocità del rotore in condizioni nominali è sempre minore di un 3-6%; è il fenomeno dello scorrimento (slip) che consente la produzione della coppia. Dalla formula che definisce lo scorrimento è possibile esprimere la velocità di rotazione effettiva del rotore . dove s è lo scorrimento, ns è la velocità di sincronismo e nr è la velocità reale alla quale ruota il rotore. Il valore effettivo dello scorrimento dipende dal carico effettivo sul rotore. Il carico non è mai nullo perché sono sempre presenti i fenomeni di attrito tra le parti mobili e con l’aria che impediscono al motore di ruotare alla velocità di sincronismo, vincendo questa coppia meccanica. Questi motori sono frequentemente alimentati per mezzo di inverter elettronici che possono controllare la velocità di rotazione del motore, variando in modo coordinato la frequenza e la tensione di alimentazione. L’uso di inverter permette di azionare il motore anche a partire da una corrente continua, come avviene nella trazione ferroviaria. Gli avvolgimenti statorici trifase possono essere collegati a stella oppure a triangolo, permettendo di alimentare lo stesso motore con tensioni trifase di 400 e 230 V. In alcuni grossi motori si preferisce avviare a stella e poi commutare a triangolo, al fine di limitare le correnti di spunto, quando non sono utilizzati gli inverter. Esistono motori asincroni di potenza usualmente inferiore a 3 kW alimentati anche con tensioni monofase. Tali motori possono essere dotati di ordinari avvolgimenti a due fasi, dove per alimentare la seconda fase si usa il ritardo di tempo introdotto da un condensatore; un tipico esempio è costituito dai motori utilizzati per far girare le pale dei ventilatori domestici o degli asciugacapelli. Per potenze piccolissime si usano i motori in cui la seconda fase è un circuito spazialmente asimmetrico chiuso in corto circuito (motori a “polo shuntato”). I motori asincroni operano normalmente con gli avvolgimenti di rotore chiusi in corto circuito ma il rotore può essere eseguito in costruzioni differenti.
Rotore a gabbia di scoiattolo:
Per quanto riguarda la struttura dei circuiti indotti, il tipo più semplice e robusto di rotore si realizza infilando nei canali altrettante sbarre di rame o di alluminio pressofuso, ciascuna delle quali riempie completamente un canale. Le testate delle sbarre che sporgono dal pacco lamellare vengono direttamente collegate fra loro, da una parte e dall’altra, mediante un grosso anello di rame. Il rotore così costruito prende la forma e viene indicato coi nomi di rotore a gabbia di scoiattolo o rotore in corto circuito. Questi motori devono il loro nome alla somiglianza del rotore alle gabbie usate generalmente da scoiattoli per correre. Questi motori sono largamente utilizzati nell’industria in quanto affidabili ed economici.
Published: Dec 15, 2022
Latest Revision: Dec 15, 2022
Ourboox Unique Identifier: OB-1396757
Copyright © 2022
![]()
 Skip to content
Skip to content